


Rethinking Expressways for the Future

Expressways are the way they are because they’ve been designed decades ago for human drivers. With any legacy system like this, it’s But it, would we build them the same way? Of course not. We’d build for the future, for autonomous vehicles.
If you think self-driving technology is not mature, that’s because it’s forced to run on roads designed for human drivers, sharing the road with unpredictable, accident-prone humans. If we design an expressway for autonomous vehicles, it’s an easier task. How would we do this?
• There will be a ground traffic control (GTC), which is a computer routing all vehicles. It will decide which vehicle drives at which speed and in which lane. When lane changes happen. And so on. Each vehicle will just follow instructions given by GTC. All vehicles' will have a computer that interfaces with GTC and follow directions. This will result in globally optimal routing, not locally optimal:
Only computer-driven vehicles will be permitted onto the expressway, not legacy vehicles, let alone bicycles or pedestrians. A few years back, there was a lot of hype about self-driving vehicles. People expected to see them on every road by now. That hasn’t happened. And a part of the reason is that designing autonomous vehicles that coexist with human-driven ones is a hard problem. When we’re unable to make progress on a problem, we should simplify the problem. Besides, since humans are not as fast to react or as consistent, allowing human-driven vehicles onto the expressway will slow things down for everyone.
Autonomous vehicles can also follow very closely, such as with a gap of 1 foot. Human drivers should follow the 2 second rule. If autonomous cars reduce the headway to 0.1 seconds, that increases the capacity of the road 20x (2/0.1). If you’re thinking this is unsafe, it’s not, since the vehicle ahead won’t brake. Braking is required only when you’ve accelerated too much. GTC will have global visibility into what’s coming down the road, so vehicles won’t be asked to accelerate first and then brake, which results in an uncomfortable ride, wastes energy, increases wear and tear on vehicles, and increases the risk of an accident. Since the vehicle ahead of you won’t brake, your vehicle can follow closely, increasing the capacity of the road 20x and reducing energy usage. Such global optimizations will be possible because of GTC. Once we’re used to this, today’s uncoordinated roads will seem primitive.
• All vechicles will travel at the same speed, which is based on the geometry of the road like curves — you can’t travel at high speed on a sharp bend, or the vehicle will slide off the road, roll over, or throw passengers around. If the road is canted, you can travel faster than you otherwise could:

Humans are also comfortable with only a certain amount of acceleration like 0.1g. Based on these geometric and human factors, every segment of a road has a certain design speed. This will be communicated by GTC to each vehicle. If the speed in a certain stetch of road is 150 km/hour, all vehicles traveling there will travel at 150 km/hour. Why? For a whole bunch of reasons: first, one vehicle traveling slower will reduce the capacity of the road as a whole, since other vehicles have to queue up behind it. Or they can weave, which makes for an uncomfortable and unsafe ride. Second, designing a road for higher speed costs more, and if you’re going to drive slower, the investment goes waste. If vehicles are going to drive slowly, it’s cheaper to design the road for a lower speed to begin with. This is an example of global optimization. Third, accidents are caused not by speed but by differences in speed. For these reasons, vehicles will all travel at the speed commanded by GTC.
• Since all vehicles travel at the same, high, speed, one lane in each direction will be sufficient. This will cost less than a multi-lane expressway and enable smaller towns to be connected to the expressway network which won’t be viable otherwise. Further, every city can have a dense network of expressways blanketing the city every kilometer apart, rather than fewer multilane expressways. A dense network will shorten travel time to an arbitrary point in the city.
• Only vehicles that meet high performance requirements will be allowed onto the expressway. For example, they should be able to reach a speed of 200 km/hour. And accelerate at 0.1g till 200 km/hour. Vehicles tend to lose steam as they pick up speed and can accelerate only slowly. For example, beyond 120 km/hour, my car takes forever to accelerate. Such vehicles won’t be allowed onto the expressway. They should be able to accelerate at 0.1g till they reach 200 km/hour.
• Signs, lane markings and other elements of the road designed for human drivers will disappear. This information will be sent digitally by GTC.
• Similarly, turn indicators and brake lights can be rethought. Instead of a tail light, can we have a light that toggles on and off rapidly to communicate information? Or changes color? Or can we have a 10x10 patern of LEDs that can be individually controlled to encode information, like a low-resolution screen that will be read by the vehicles behind it?
• Pollution will be drastically reduced. Only electric vehicles will be allowed onto the expressway, eliminating emissions. Streetlights, headlamps and tail lights can all be infrared eliminating light pollution for people living near the expressway.
• Lanes will be wider, given the higher speed of 200 km/hour.
• In addition to the vehicles we know — cars, vans, buses, etc — there could be new kinds of vehicles. For example, a single-seater car, which makes more efficient use of road space than having one person travel in a five-seater car. You could have a sleeper car, which has a bed you can sleep on. Imagine boarding in Delhi, going to sleep, and waking up next morning in Pune. The sleeper car may not even have any seats.
• Since the car will be driven by computer and have gentle acceleration, no braking, and no swerving, you’ll be able to sleep without disturbance.
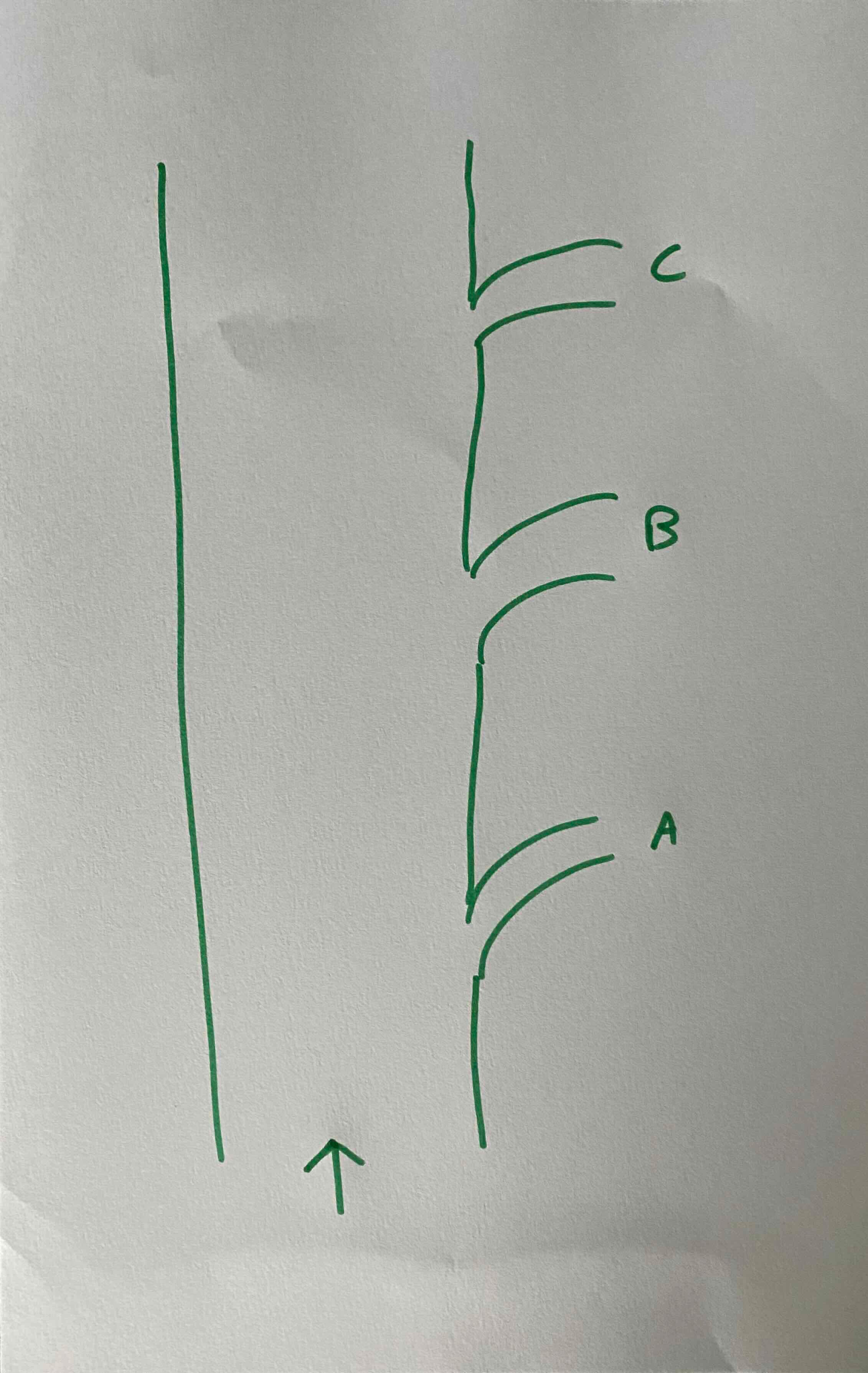
• The expressway will have surge pricing. Off peak use, when nobody else is using it, will be free. In rush hours, the fee will be high enough to encourage people to travel in a bus or other form of public transportation. Why surge pricing? To bring congestion under control. If it’s free to use, it doesn’t discourage people from driving. Building more roads is not the answer. If anything, it can cause more traffic. The problem with free roads is that the economics doesn’t work out: if you’re not charged when you use it, you’ll use it more, just as you’d go to a restaurant every day if they didn’t charge you per use. In an ideal world, every road will be a toll road. And the toll will apply only for those segments of the road that are congested. Look at this expressway with three exits A, B and C:
There’s no congestion anywhere, so there will be no financial cost to using it. After some time, say C gets congested, and the congestion backpropagates onto the expressway itself:
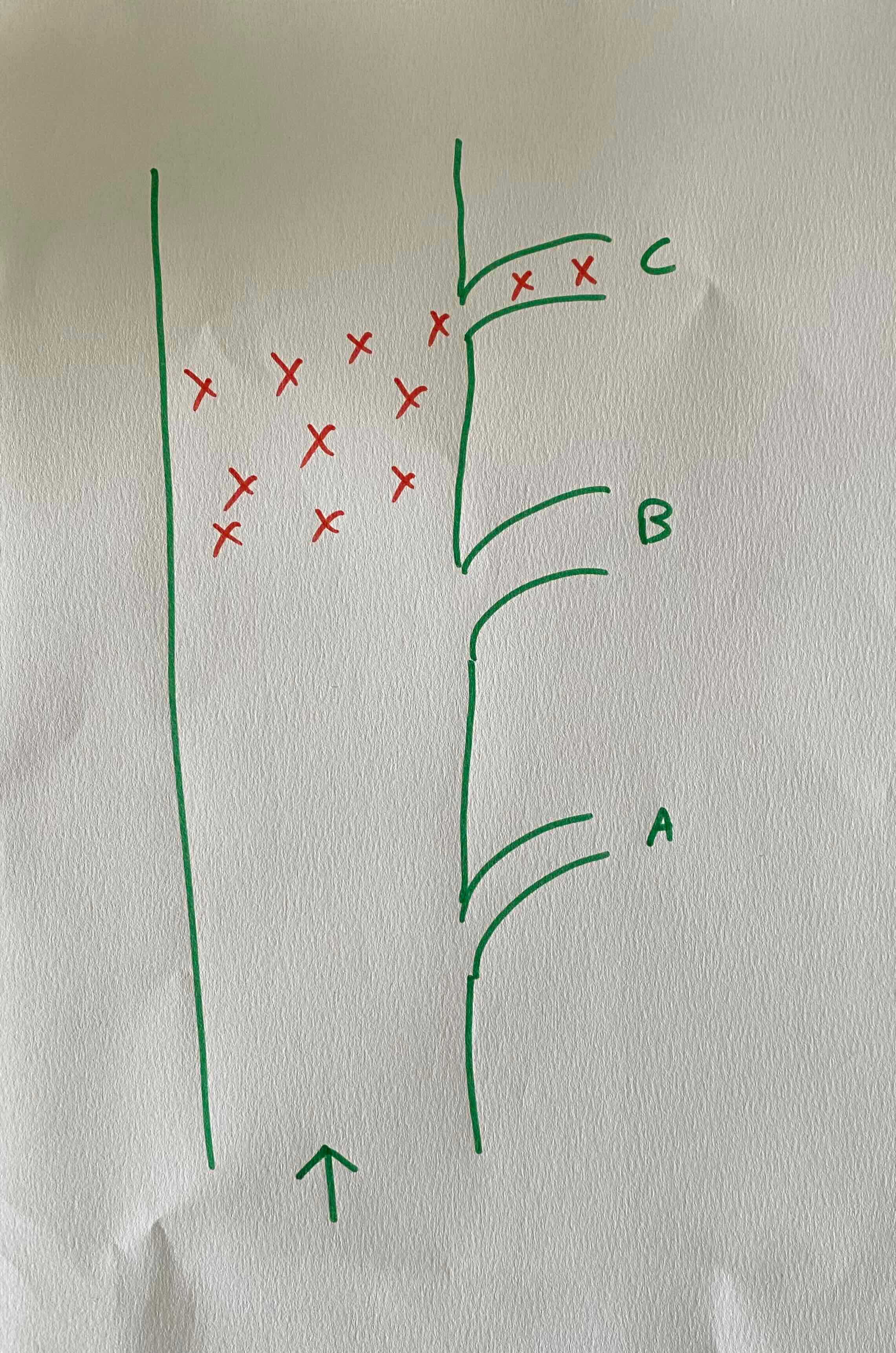
This might happen because C is in the city centre, and it’s rush hour, with everyone wanting to go to the office. Now a congestion charge will be imposed on all the vehicles represented by the red crosses in the picture, as well as any other vehicle that would add to the congestion. If someone wants to exit at A or B, there will be no congestion charge. This might encourage some people to change their plan, exit at B, and walk a few kilometers to the office, which is healthy, too. As another example, if you’re about to leave for office, and you get a notification saying that the trip will cost you ₹1000, you might delay your trip by a couple of hours. Or you might take a bus. If there are 50 people on the bus, each person pays only ₹20 towards the congestion charge. This takes 49 vehicles off the road, hugely easing congestion. That’s the real economic logic behind surge pricing — it changes behavior, preventing a tragedy of the commons.